
1.Introdución
LABVIEW es un lenguaje de programación gráfica con capacidades de utiidad que lenguaje C o C++. Algunas capacidades de C++ es más dificil de obtener en Labview, pero a efectos de los sistemas de control Labview es un lenguaje de programación excepcional esto es po las razones siguientes:
- Labview habilita herramientas de analisis gráficas (diagrama de bloques) que usamos para analizar los sistemas de control con mayor facilidad.
- Labview idealmente sin problemas incorpora "Hardware en el lazo".
Veremos en este tutorial la evidencia de estas razones.
Labview es como C, como C es a asembler, donde las lineas representan tipos de datos, bloques que representan manipulación de datos. Por último, vale la pena mecionar que Labview está compilado , no interpretado.
La principal diferencia entre un lenguaje compilado y uno interpretado es que el lenguaje compilado requiere un paso adicional antes de ser ejecutado, mientras tanto un lenguaje interpretado es convertido a lenguaj de máquina a medida que es ejecutado.
Ejemplos de lenguajes compilados: C,C++,Java.Go,etc. Ejemplos de lenguaje interpretado: Ruby, Python,JavaScript, entre otros.
2.Modo Simulación
El bloque de simulación será uno de las herramientas básicas usadas en simulación de sistemas y emperimentos con hadware.
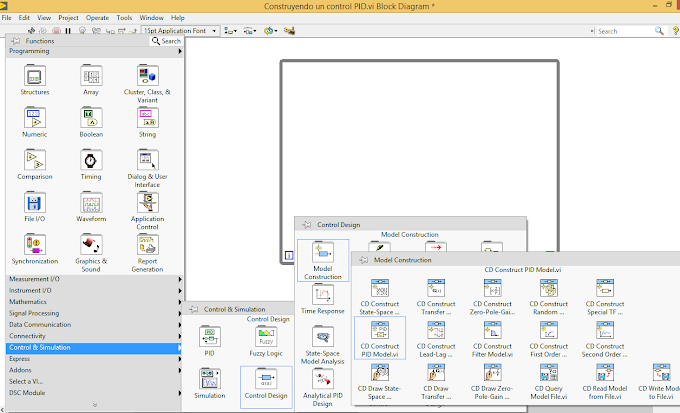
Para ello primero debes de abrir el Toolkit "control design and simulation" para ello primero se debe de instalar.
 |
| Toolkit Control & simulación |
En este Tolkit abrimos el bloque "simulation"
 |
| Bloque "Simulation" |
 |
| "Control & Simulation Loop-Ciclo de control y simulación" |
Todas las cosas que debe ejecutarce en cada paso de una simulación o experimento de hadware debe colocarce dentro del ciclo de simulación, todo lo demas puede mantenerce fuera de él.
El ciclo de control y simulación se puede configurar aspectos como:
- Duración de la simulación.
- Parámetros que involucran al tiempo.
- Determina el tamaño del paso tanto para algoritmos de integración de paso fijo como para ejecución de experimentos de hadware.
- Se puede usar algoritmos como euler, fixed time step,Runge-Kutta y variable time step algoritms.
Todas estas opciones se pueden configurar haciendo click con el botón derecho en el ciclo de simulación y seleccionando.
 |
| Para abrir cuadro de dialogo |
el cuadro que se abre es como se aprecia a continuación:
 |
| Cuadro de diálogo |
2.1Ejemplo
Sistema Convergente
Se va a graficar la señal de salida si se tiene el sistema con dos polos en -1 dentro del plano S(Laplaciano)aplicandole una entrada escalón unitaria.

dentro de "Control & Simulation Loop" colocamos nuestros 3 bloques:
- Entrada scalón(Step Signal).--> se encuentra en dentro de Signal Generation.
 |
| "Signal Generation" |
le damos doble click para configurar la señal step
En la configuración se puede cambiar el valor inicial, valor final y el momento(tiempo) del pulso.
 |
| "Step Signal Configuration" |
- Función de Transferencia(Transfer Function).--->se encuentra dentro de Continuous Linear Systems.
 |
| "Continuous Linear Systems" |
le damos doble click para configurar la función de transferencia.
Ingresamos los ceros y los polos. a2 es el coeficiente de S^2, a1 es el coeficiente de S^1
| "Transfer Function Configuration" |
- Gráfica de la resuesta del scalón(Sim Tine Waveform).--->se encuentra dentro de Continuous Linear Systems.
 |
| "Graph Utilities" |
Unimos nuestros bloques
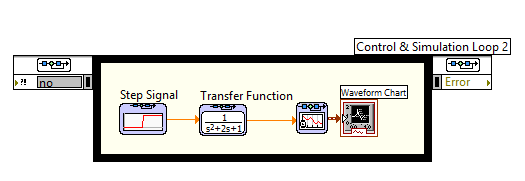
Simulamos el proceso
 |
| "Respuesta de la señal scalón unitario" |
Aquí un video del poder de Labview en simulación y control de procesos.






{kind=link}
0 Comentarios
Gracias por visitar esta página